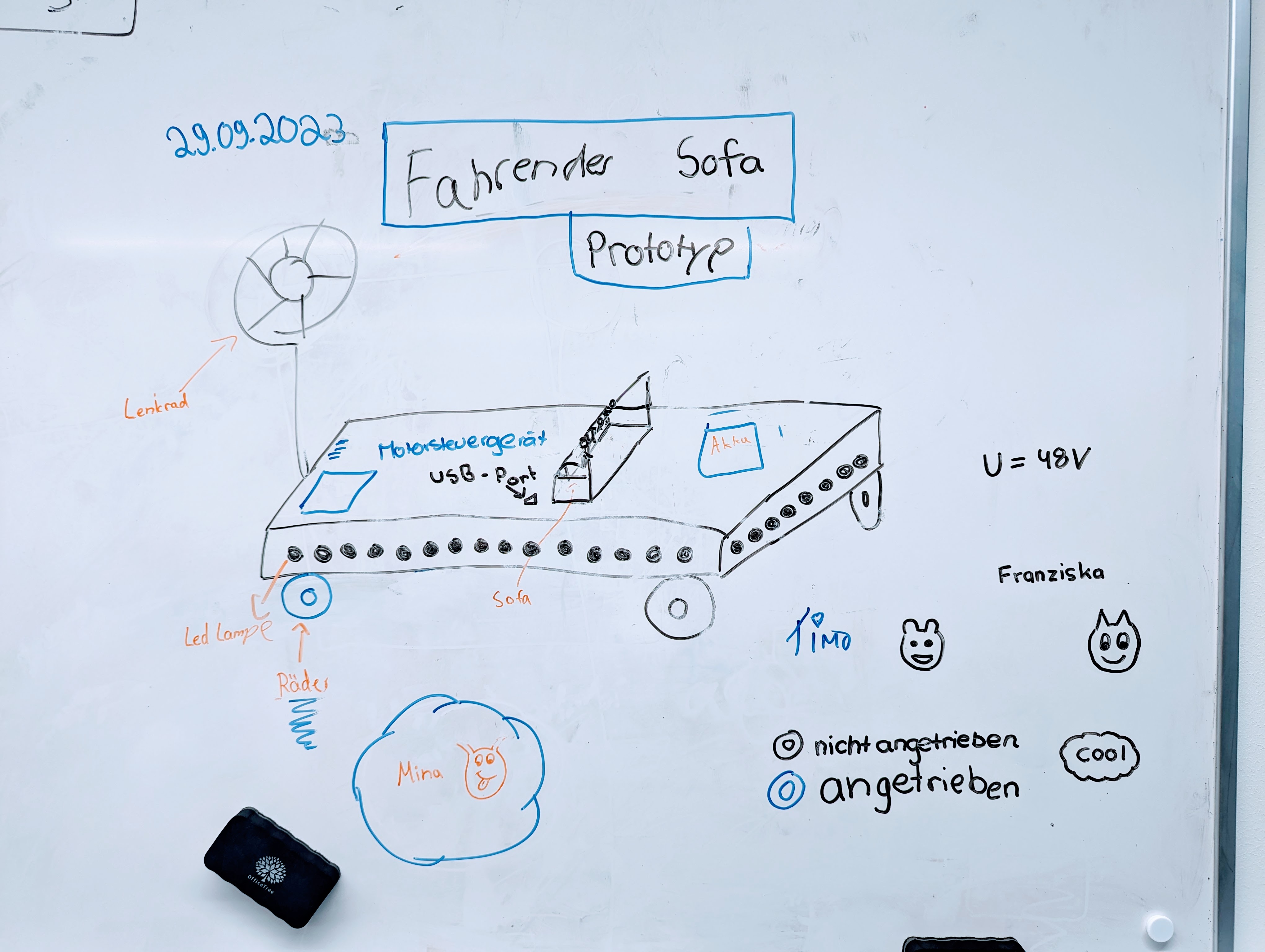
Die Idee
Was muss es können?
- Gemütlich
- Leuchtend
- Lenken
- (Bremsen) optional
- 3 Plätze (mindestens)
Prototyp
- Erst mal ein Brett mit 2 nicht angetriebenen festen Rollen.
Die Firmware
Viel einfacher gibts das (hier)[https://mad-ee.com/easy-inexpensive-hoverboard-motor-controller/]
[https://github.com/EFeru/hoverboard-firmware-hack-FOC]
Mehr Infos dazu im Wiki: (hier)[https://github.com/EFeru/hoverboard-firmware-hack-FOC/wiki/Firmware-Compatibility]
Infos aus der Mail:
Hallo Fabian,
ich erinnere mich. Ja gerne beantworte ich Eure Fragen:
In den Hoverboards steckt überall die gleiche Technik drin, auch wenn die Layouts der PCBs sich leicht unterscheiden.
Ich habe mich hier an diesem Projekt orientiert und dort kommt auch ein Teil meiner Software her: https://github.com/EFeru/hoverboard-firmware-hack-FOC
Die haben auch ein Wiki in dem unteranderem erklärt wird welche Motoren es gibt und wie die sich optisch auseinanderhalten lassen.
Die Motoren haben 250W bis 350W. Ich habe damals geschaut welche mit 350W zu bekommen.
Die Ansteuerung der Motoren kommt auch aus dem Hoverboard, aber mit der Software siehe link.
Ich habe da aber noch einiges umgeschrieben um das ganze mit ESP32, Allradantrieb und Display nutzen zu können.
Ich bremse mit den Motoren durch Recuperation, habe zur SIcherheit aber auch Fahrrad Scheibenbremsen an der Hinterachse montiert.
Wenn das ganze richtig Spass machen soll und nicht nach 10min wieder aufgeladen werden muss, dann braucht man da einen Akku was mit >500Wh Kapazität und Leistung 3kW - 5kW
Ich Nutze einen 14S7P Li-ion Akku mit 1kWh (58,8V & 17,5Ah), damit fahre ich mein Cart mit ca 4,5kW peak. Abhängig vom Fahrstyl sind so 30min bis 3h fahren drin.
Als BMS nutze ich ein LLT Power Smart BMS: https://www.lithiumbatterypcb.com/product/13s-48v-li-ion-battery-pcb-board-54-6v-lithium-bms-with-60a-discharge-current-for-electric-motorcycle-and-e-scooter-protection-2-2-3-2-2-2-2-2/
Der Akku ist selbst gebaut, gibt es so leider nicht zu kaufen.
Das näheste sind E-Bike Akkus, aber die haben nur 10S (42V) und hören in der Regel bei 500Wh auf. Da kann man auch gleich die Hoverboard Akkus nehmen, wenn die nicht defekt sind. Macht aber keinen Spass
Das Laden übernimmt ein 1kW Labornetzteil: https://www.amazon.de/gp/product/B08NSWKZV8/ref=ppx_yo_dt_b_asin_title_o00_s01?ie=UTF8&th=1 und das im Akku eingebaute BMS.
Ganz wichtig sind Sicherheitsvorkehrungen: Also Mechanische Bremsen, Hauptschalter/Notaus, Sicherungen (ich Nutze hier B32 Leitungsschutzschalter, die sind bis 60V DC zugelassen). Meine Schaltung erlaubt es, dass die Motoren und Leistungselektronik spannungsfrei geschaltet ist sobald man anhält. Der Rest der Elektronik (Licht, Display, Mainboard) bleibt weiterhin mit Strom versorgt.
Das ganze ist schon ein Haufen Arbeit gewesen, auch ohne Display und selbstentwickelte LED-RGB Scheinwerfer. Wenn das was werden soll braucht es gewisse Disziplin. Man steht bei so einem Projekt immer wieder an eine Stelle wo es nicht weiter geht, etwas kaputt geht, oder wo ein Microcontroller in Flammen auf geht oder einfach nicht genau das macht was man sich vorstellt. Den Fehler und die Ursache rauszufinden ist aufwändig.
Mit allem drum und dran (Mit Akku, Ladegerät, Scheinwerfer) hat mich das Projekt bisher ca. 1700€ gekostet. Der Akku ist mit 600€ das teuerste.
Hardware
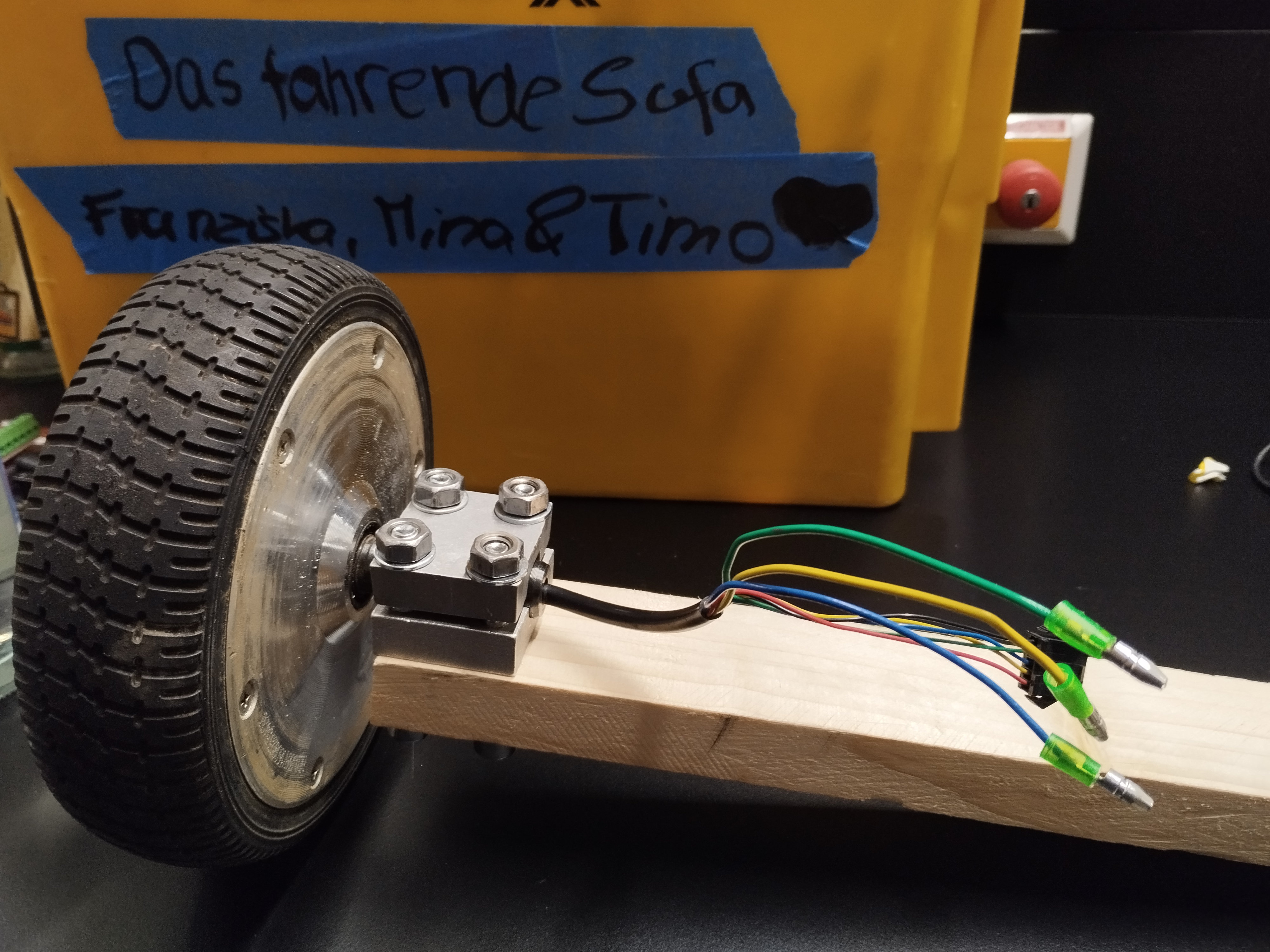
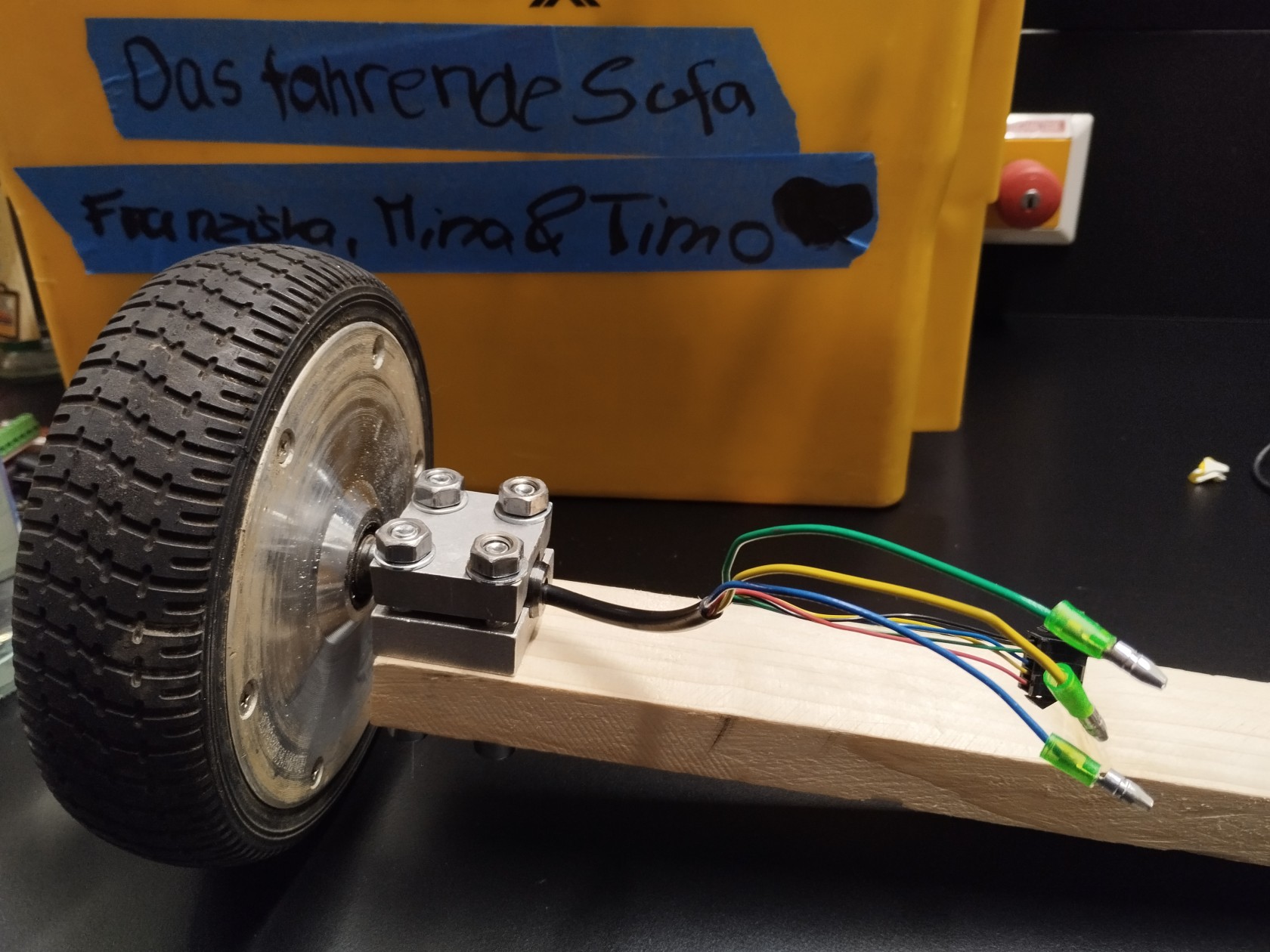
- 10.11.2023: Heute haben wir eine Tischhalterung für das Rad unseres Sofas gebaut.
- Wie wir es gemacht haben: Die Achse haben wir mit zwei Befestigung an einem Brett befestigt damit ein Modell des Brettes entsteht.
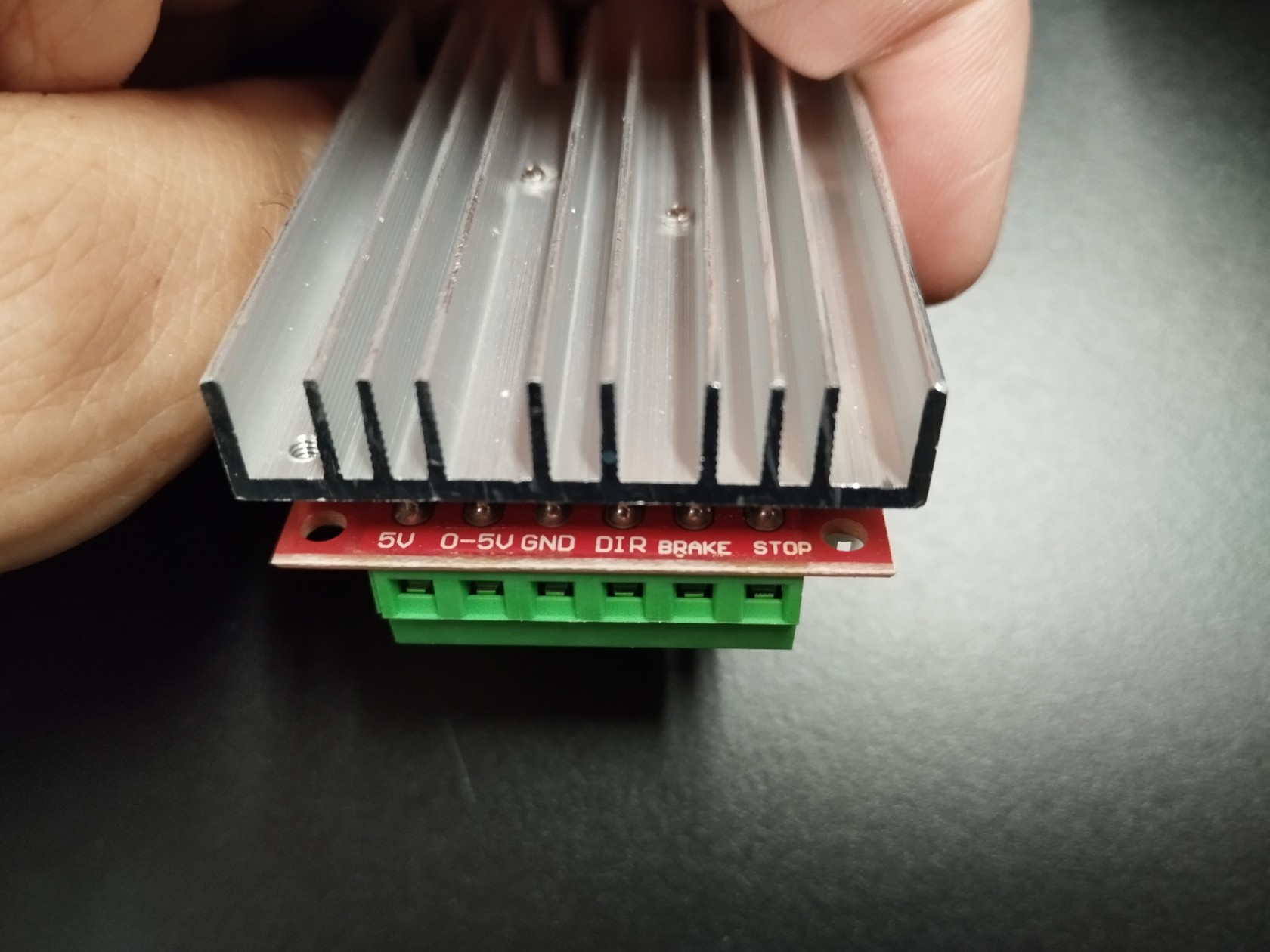
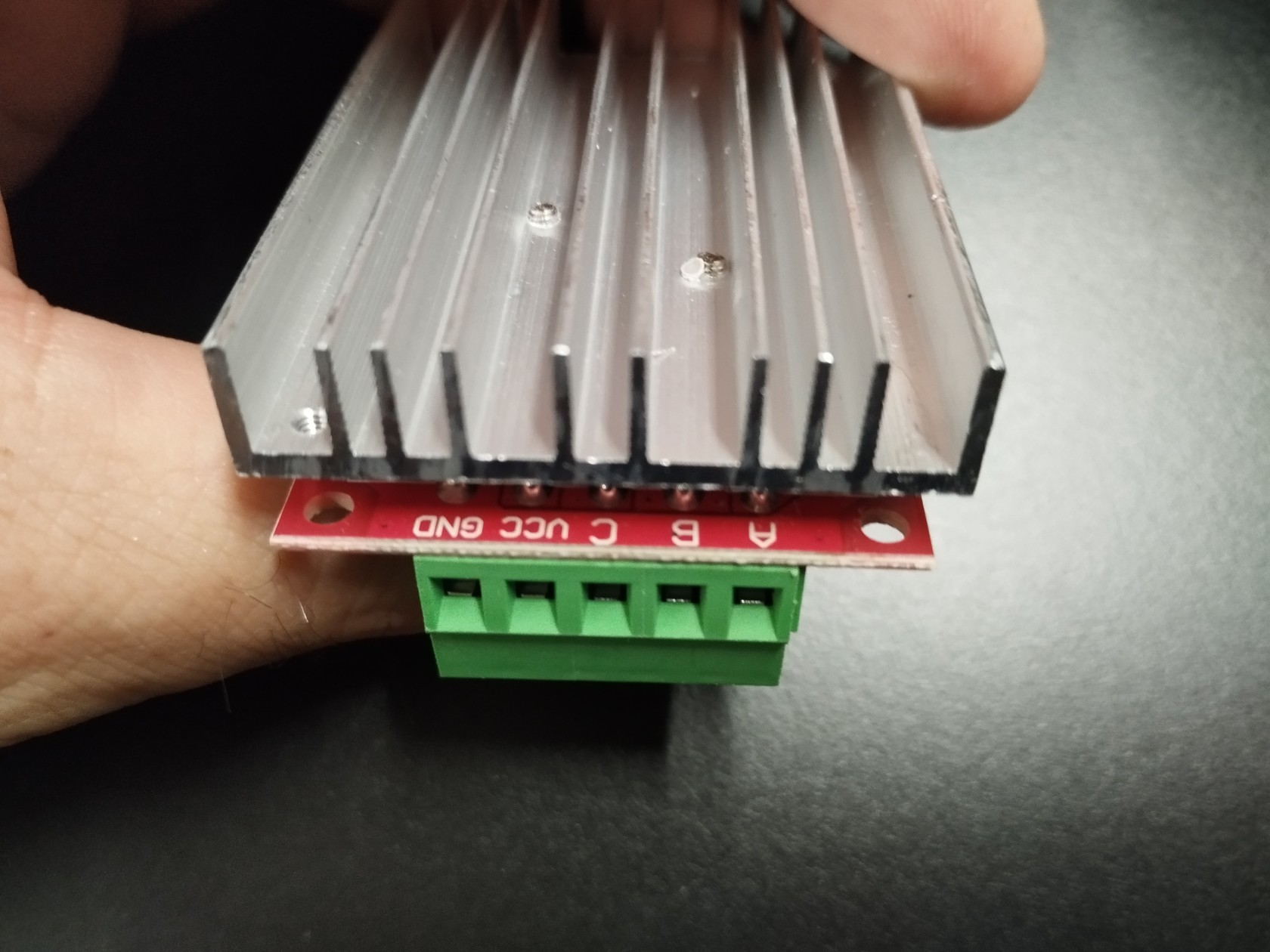
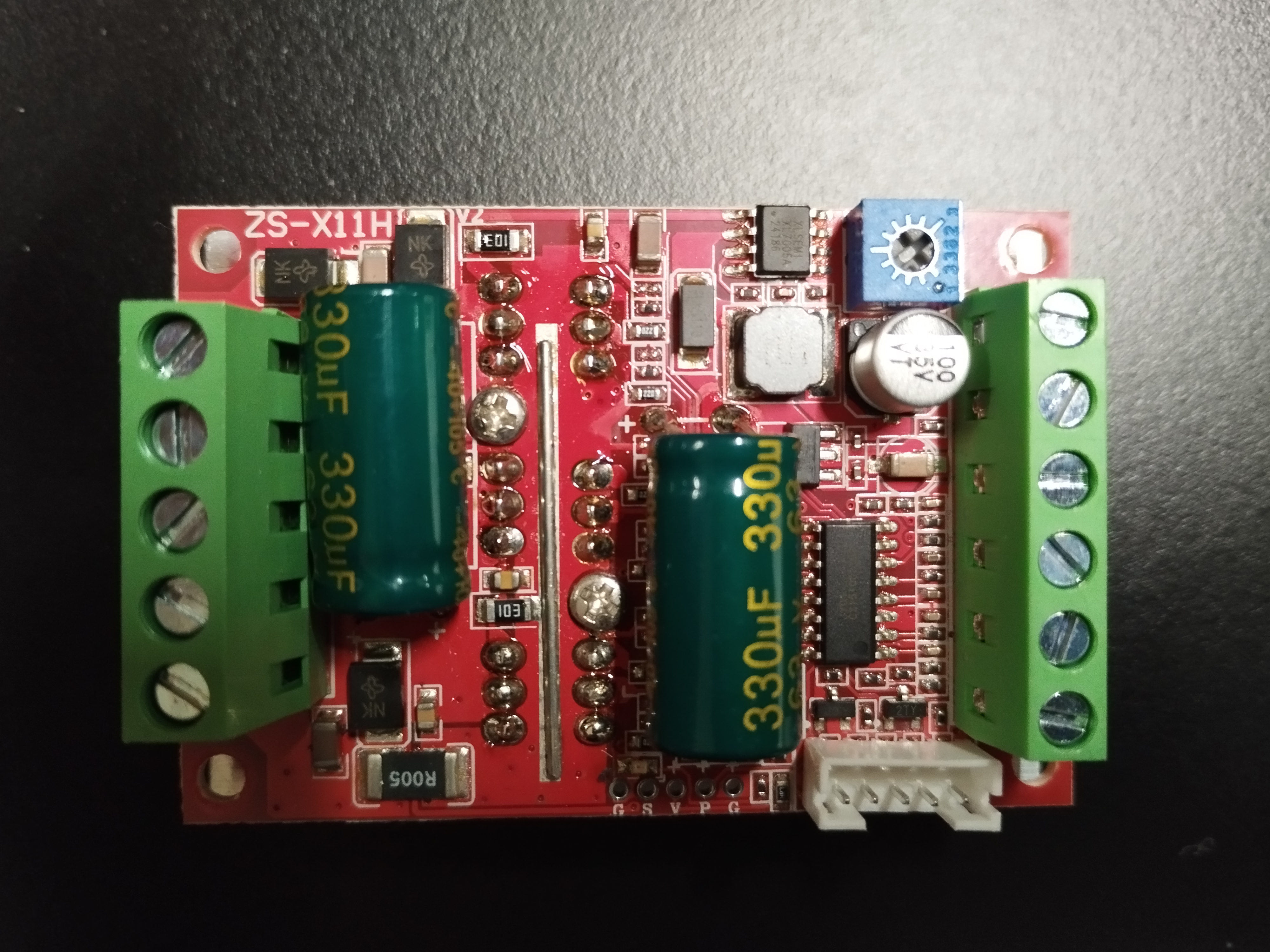
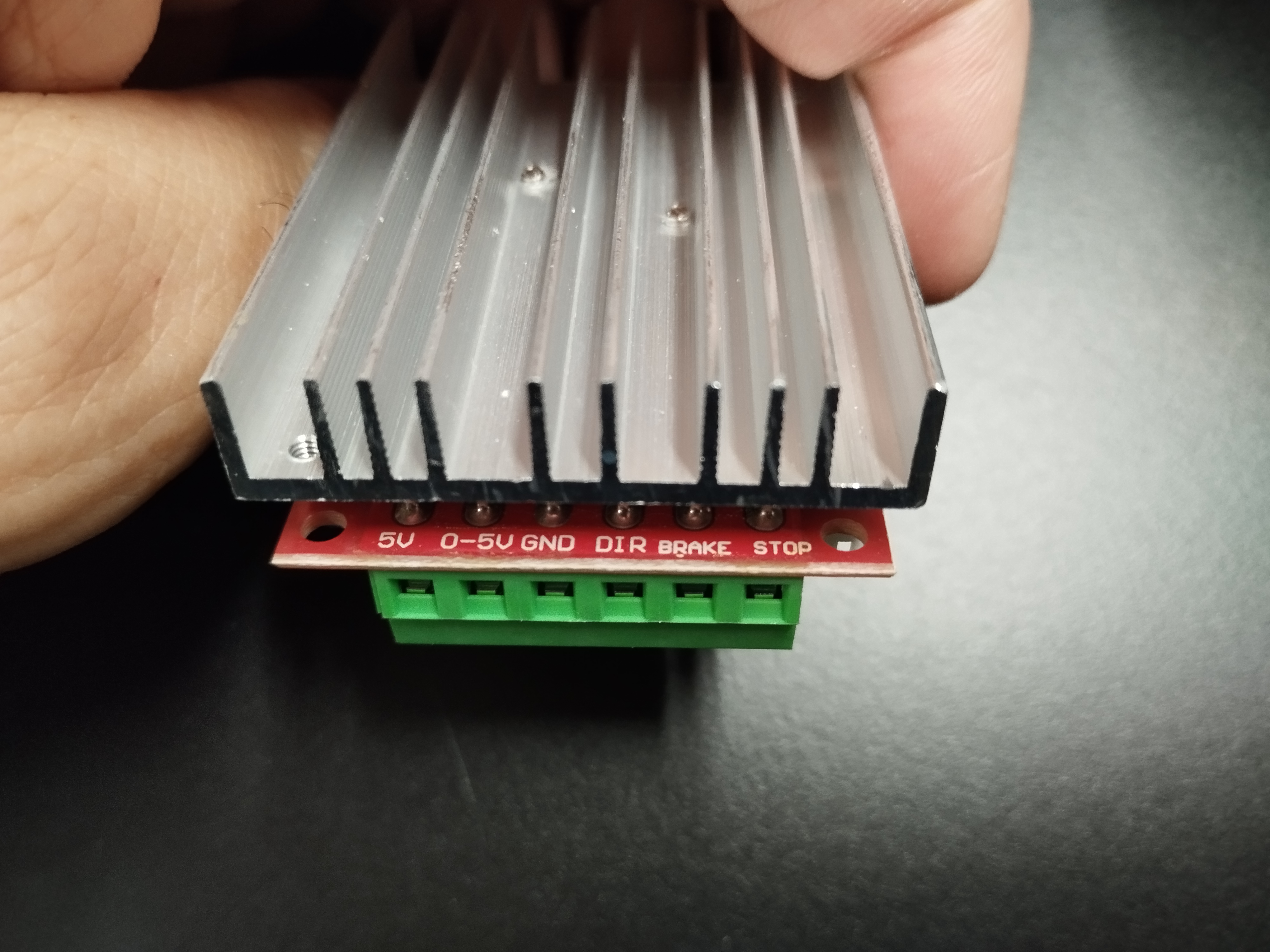
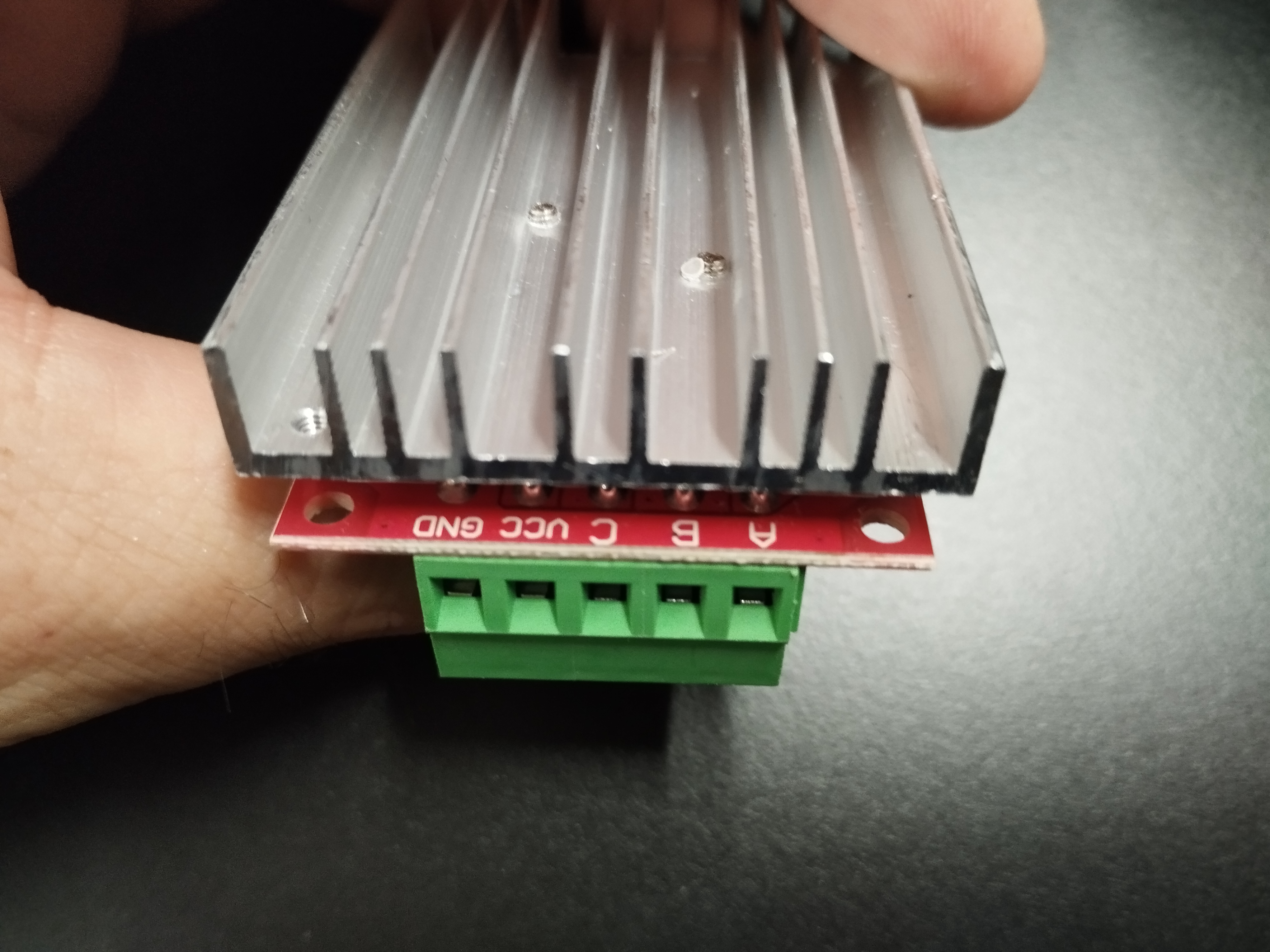
- Unser Motortreiber ist vom Typ ZS-X11H. Das ist ein Brushless Treiber PWM.
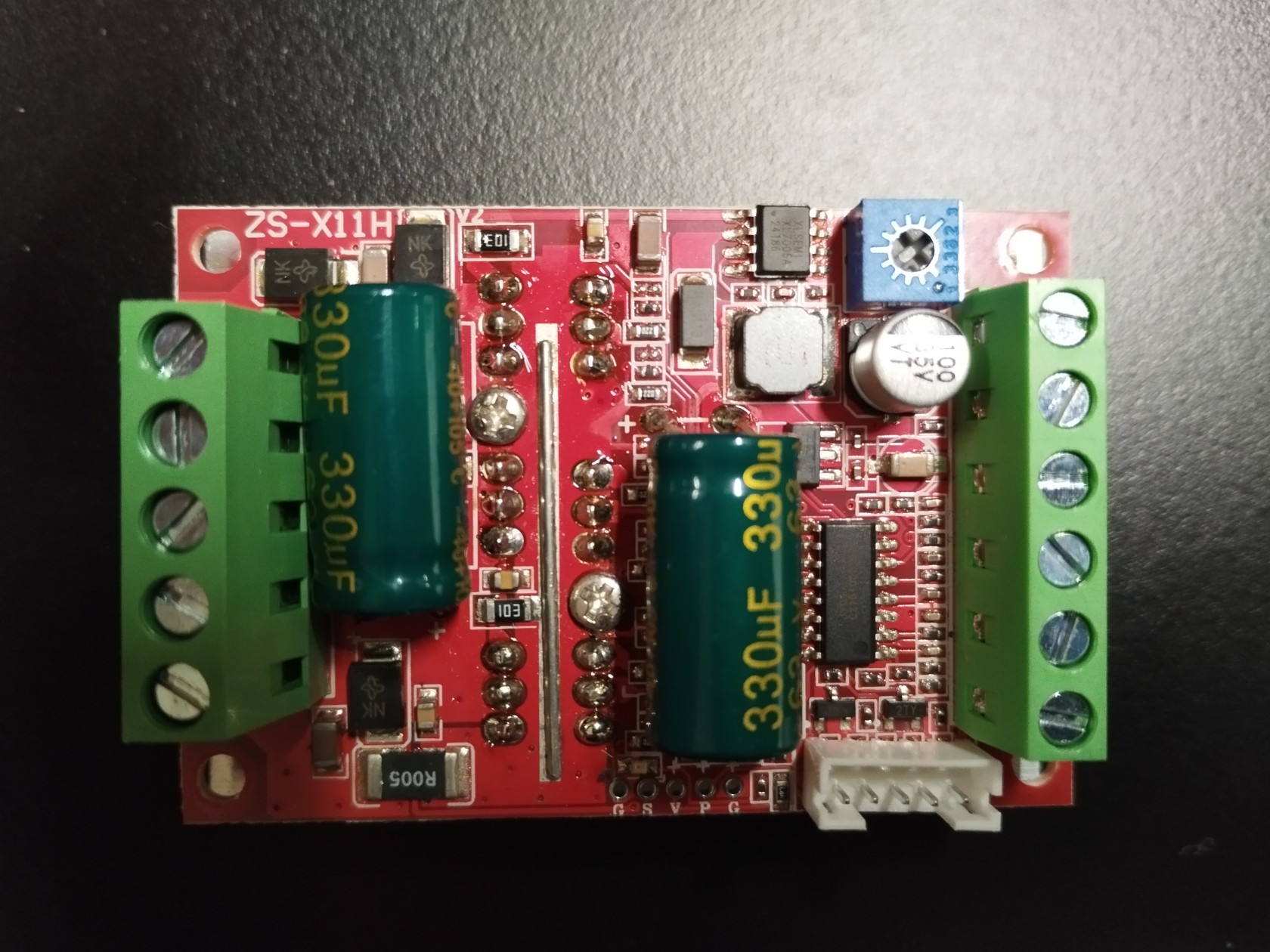
- Übersetzt heißt Brushless so viel wie bürstenlos (keine Kohlebürsten)